 |
 |
|
 |
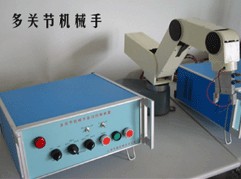
多关节机械手模型
|
概述
多关节机械手模型由机械与电气两部分组成。机械部分由底盘、五个关节及气动抓手组成。机械传动系统采用了丝杠副、定位杆等机械零件;电气控制采用了 PLC ,开关电源,步进电机及驱动模块及传感器等技术。该装置适用于大、中专院校学生毕业设计、课程设计、实习实验等工程实践的实验设备,其基于 PC 的编程(多轴连动)可作为研究生毕业设计项目。 |
各接口定义
1 、自动控制信号与主电路板接口( J1 ); PLC 控制的输入 / 输出( I/O )
|
IDC26 |
DB25 |
功能 |
I/O |
注释 |
|
1 |
1 |
GND |
|
地 |
|
2 |
2 |
GND |
|
|
3 |
3 |
S1 |
X20 |
关节 1 极限位置信号 |
|
4 |
4 |
S2 |
X21 |
|
5 |
5 |
S3 |
X22 |
关节 2 极限位置信号 |
|
6 |
6 |
S4 |
x23 |
|
7 |
7 |
S5 |
X24 |
关节 3 极限位置信号 |
|
8 |
8 |
S6 |
X25 |
|
9 |
9 |
S7 |
X26 |
关节 4 极限位置信号 |
|
10 |
10 |
S8 |
X27 |
|
11 |
11 |
S9 |
X6 |
关节 5 极限位置信号 |
|
12 |
12 |
S10 |
X7 |
|
13 |
13 |
CP1 |
Y20 |
关节 1 步进电机信号(步进脉冲与方向电平) |
|
14 |
14 |
DIR1 |
Y21 |
|
15 |
15 |
CP2 |
Y22 |
关节 2 步进电机信号(步进脉冲与方向电平) |
|
16 |
16 |
DIR2 |
Y23 |
|
17 |
17 |
CP3 |
Y24 |
关节 3 步进电机信号(步进脉冲与方向电平) |
|
18 |
18 |
DIR3 |
Y25 |
|
19 |
19 |
CP4 |
Y26 |
关节 4 步进电机信号(步进脉冲与方向电平) |
|
20 |
20 |
DIR4 |
Y27 |
|
21 |
21 |
DCF |
Y0 |
电磁阀信号 |
|
22 |
22 |
DJZ |
Y1 |
关节 5 (直流电机)正反动作信号 |
|
23 |
23 |
DJF |
Y2 |
|
24 |
24 |
TS1 |
特殊用途信号 |
|
25 |
25 |
TS2 |
|
26 |
|
|
|
2 、机械手各关节位置信号与主电路板接口 ( J2 )
|
序号 |
功能 |
注释 |
|
1 |
GND |
地 |
|
2 |
GND |
|
3 |
S1 |
关节 1 极限位置信号 |
|
4 |
S2 |
|
5 |
S3 |
关节 2 极限位置信号 |
|
6 |
S4 |
|
7 |
S5 |
关节 3 极限位置信号 |
|
8 |
S6 |
|
9 |
S7 |
关节 4 极限位置信号 |
|
10 |
S8 |
|
11 |
S9 |
关节 5 极限位置信号 |
|
12 |
S10 |
|
13 |
+5V |
+5V 电源 |
|
14 |
+5V |
|
15 |
+24V |
+24V 电源 |
|
16 |
+24V |
3 、步进电机与主电路板信号接口 ( J3 )
|
序号 |
功能 |
注释 |
|
1 |
GND |
地 |
|
2 |
dir1 |
关节 1 步进电机信号 |
|
3 |
Cp1 |
|
4 |
Dir2 |
关节 2 步进电机信号 |
|
5 |
Cp2 |
|
6 |
Dir3 |
关节 3 步进电机信号 |
|
7 |
Cp3 |
|
8 |
Dir4 |
关节 4 步进电机信号 |
|
9 |
Cp4 |
|
10 |
Nc |
空 |
|
11 |
Nc |
|
12 |
+5V |
+5V 电源(用于公共阳端) |
4 、控制按键面板与主电路板连接接口 ( J4 )
|
序号 |
功能 |
注释 |
|
1 |
Dir3 |
关节 3 步进电机方向电平 |
|
2 |
Cp2out |
关节 2 步进电机步进脉冲(出开关) |
|
3 |
Dir2 |
关节 2 步进电机方向电平 |
|
4 |
Cp3in |
关节 3 步进电机步进脉冲(进开关) |
|
5 |
Dir1 |
关节 1 步进电机方向电平 |
|
6 |
Gnd |
地 |
|
7 |
Gnd |
|
8 |
Dis1 |
(附加功能用) |
|
9 |
Cp2in |
关节 2 步进电机步进脉冲(进开关) |
|
10 |
Dis2 |
(附加功能用) |
|
11 |
Cp1in |
关节 1 步进电机步进脉冲(进开关) |
|
12 |
Dis3 |
(附加功能用) |
|
13 |
Cp1out |
关节 1 步进电机步进脉冲(出开关) |
|
14 |
Dis4 |
(附加功能用) |
|
15 |
+5V |
+5V 电源 |
|
16 |
+5V |
|
17 |
c-dcf |
手动控制电磁阀信号 |
|
18 |
Nc |
空 |
|
19 |
+5V |
+5V 电源 |
|
20 |
+5V |
|
21 |
Nc |
空 |
|
22 |
Hand |
手动 / 自动选择开关信号 |
|
23 |
Hand |
|
24 |
Nc |
空 |
|
25 |
Dir4 |
关节 4 步进电机方向电平 |
|
26 |
Cp3out |
关节 3 步进电机步进脉冲(出开关) |
|
27 |
Gnd |
地 |
|
28 |
Ts1 |
特殊用途信号 1 |
|
29 |
Djz |
关节 5 手动控制信号(正转) |
|
30 |
Ts2 |
特殊用途信号 2 |
|
31 |
Cp4in |
关节 4 步进电机步进脉冲(进开关) |
|
32 |
Ts3 |
特殊用途信号 3 |
|
33 |
Cp4out |
关节 4 步进电机步进脉冲(出开关) |
|
34 |
Djf |
关节 5 手动控制信号(反转) |
5 、机械手与控制箱接口
|
DB-37 |
功能 |
注释 |
|
|
1 |
GND |
地 |
|
|
2 |
|
3 |
S1 |
限位开关信号 |
|
|
4 |
S2 |
限位开关信号 |
|
|
5 |
S3 |
限位开关信号 |
|
|
6 |
S4 |
限位开关信号 |
|
|
7 |
S5 |
限位开关信号 |
|
|
8 |
S6 |
限位开关信号 |
|
|
9 |
S7 |
限位开关信号 |
|
|
10 |
S8 |
限位开关信号 |
|
|
11 |
S9 |
接近开关信号 |
|
|
12 |
S10 |
接近开关信号 |
|
|
13 |
VCC5V |
5V 电源 |
|
|
14 |
|
15 |
VCC24V |
24V 电源 |
|
|
16 |
|
17 |
ZLDJL1 |
直流电机 L1 |
关节 5 |
|
18 |
ZLDJL2 |
直流电机 L2 |
|
19 |
NC |
空 |
|
|
20 |
1A+ |
步进电机 A 相正 |
关节 1 步进电机 |
|
21 |
1A- |
步进电机 A 相负 |
|
22 |
1B+ |
步进电机 B 相正 |
|
23 |
1B- |
步进电机 B 相负 |
|
24 |
2A+ |
步进电机 A 相正 |
关节 2 步进电机 |
|
25 |
2A- |
步进电机 A 相负 |
|
26 |
2B+ |
步进电机 B 相正 |
|
27 |
2B- |
步进电机 B 相负 |
|
28 |
3A+ |
步进电机 A 相正 |
关节 3 步进电机 |
|
29 |
3A- |
步进电机 A 相负 |
|
30 |
3B+ |
步进电机 B 相正 |
|
31 |
3B- |
步进电机 B 相负 |
|
32 |
4A+ |
步进电机 A 相正 |
关节 4 步进电机 |
|
33 |
4A- |
步进电机 A 相负 |
|
34 |
4B+ |
步进电机 B 相正 |
|
35 |
4B- |
步进电机 B 相负 |
|
36 |
DCFGND |
|
抓手电磁阀 |
|
37 |
DCF |
| |
|
自动控制 CP 选择跳线的设置( JP1 , JP2 )
自动控制信号可由 PLC 或计算机产生,控制信号接至 J1 的 DB25 插针。若改用计算机控制,务必将 PLC 上的电源插头、 I/O 接口插头拔下。控制信号为高电平( +5V )有效。输入 S1~S10 开关信号为低电平( 0V )有效。
默认自动控制的 CP 脉冲用主电路板产生。若要改为由 PLC 或计算机直接产生,须将跳线 JP1 置短路,同时将 JP2 的四路 CP 的 1 2 , 3 4 短路改为 2 3 短路,把多下的四个短路帽用于 JP1 。 | |
三自由度机械手
| 机械手实验装置是一种以步进电动机为主要控制对象的受控实验设备,主要是用于各大专院校电气自动化等相关专业学生学习,掌握步进电动机的启动精确定位,转速控制等试验与培训。 |
| 该系列装置具有多种形式,有4个自由度的圆柱坐标机械手,3个自由度多关节机械手和2个自由度的直角坐标机械手,每个自由度分别由步进电动机驱动,可以由可编程序控制器,或计算机通过相应的控制卡对其实施控制。 |
| 该系列装置具有多种应用,可进行不同组合,适应不同的实验需要 |
|
|
|
| 教学机器人 |
|
|
|
|
| |
|
|



