 |
 |
|
 |
SM-2/3交流伺服教学系统
系统配置: |
|
型号 |
控制器 |
驱动部件 |
机械本体 |
可选件 |
| SM-200 |
国产两轴运动控制卡 |
日本/韩国步进电机 |
两维平台(低精度)行程200*200 |
|
| DC-200 |
美国Deltatau多轴运动控制卡 PMAC2A-104 |
台湾东源直流伺服电机 |
两维平台(高精度)行程200*200 |
1、 USB通讯接口
2、 光栅尺
|
| AC-200 |
美国Deltatau多轴运动控制卡 PMAC2A-104
|
日本富士伺服/四通伺服电机 |
两维平台(高精度)行程200*200 |
1、 USB通讯接口
2、 光栅尺
|
| AC-300 |
美国Deltatau多轴运动控制卡 PMAC2A-104
|
日本富士伺服电机 |
三维平台(高精度)行程200*200*150 |
1、 USB通讯接口
2、 光栅尺
3、 变频主轴
| |
|
 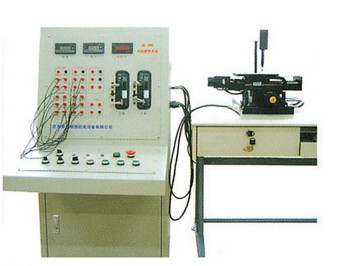
实验内容: |
- 反馈元件的应用:编码器M/T法测速原理,码盘索引信号应用及回零精度
- 伺服驱动部件应用:直流伺服调节特性及机械特性,交流伺服电机特性及驱动器操作,交流伺服控制方式选择
- 伺服系统调整实验:PID调节及意义,前馈调节对加工精度的影响
- 数控插补原理:逐点比较法插补原理,直线及圆弧插补
- 数控加工:G代码编程
- 系统精度测量及误差补偿:定位精度、重复精度测量,间隙补偿
- 开环系统与闭环系统的比较及其对精度的影响
- 机电一体化系统设计
|
|
|
|
|
| |
|
|



