

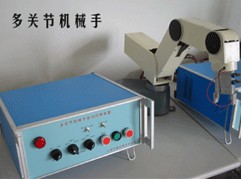
Multi-joint manipulator model
Outlined
Multi-joint manipulator model by the Mechanical and Electrical composed of two parts. Mechanical parts from the chassis, five army of the joints and pneumatic components. Leadscrew mechanical drive system used Deputy, positioning rod, and other mechanical components; electrical control by the PLC, switching power supply, and stepper motor drive modules and sensor technology. The device applies to large colleges students graduate design, curriculum design, experimental works internship practice laboratory equipment, its PC-based programming (multi-axis-linked) can be designed as a graduation project.
Copyright(C) 2006 shanghai Kerong Science and Education Equipment Co., Ltd
Address: Shanghai zhabei District zhongxin Road 1258, Zip code: 200070
Mobile:0086-13586211113 Tel: +86.21.66613898/66613899 Fax: +86.21.66613899
Beijing Branch Address: Beijing daxing District jiukong zone Third Committee East 500 meters Zip code: 100076 Tel :+86.10.88602106
E-mail: kerong@shkr.com
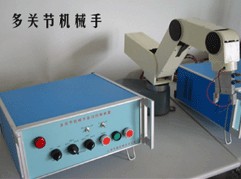
Multi-joint manipulator model by the Mechanical and Electrical composed of two parts. Mechanical parts from the chassis, five army of the joints and pneumatic components. Leadscrew mechanical drive system used Deputy, positioning rod, and other mechanical components; electrical control by the PLC, switching power supply, and stepper motor drive modules and sensor technology. The device applies to large colleges students graduate design, curriculum design, experimental works internship practice laboratory equipment, its PC-based programming (multi-axis-linked) can be designed as a graduation project.
Copyright(C) 2006 shanghai Kerong Science and Education Equipment Co., Ltd
Address: Shanghai zhabei District zhongxin Road 1258, Zip code: 200070
Mobile:0086-13586211113 Tel: +86.21.66613898/66613899 Fax: +86.21.66613899
Beijing Branch Address: Beijing daxing District jiukong zone Third Committee East 500 meters Zip code: 100076 Tel :+86.10.88602106
E-mail: kerong@shkr.com

